
探索创新科技的前沿,感受未来机器人的魅力。这里汇集了来自各高校团队的优秀参赛作品,展现科技创新的无限可能。
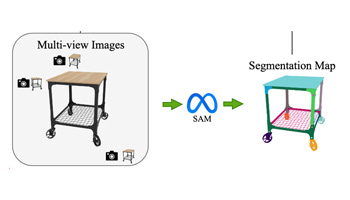
G-Force
GaussianProperty零样本识别系统,借高斯过程跨模态推断材质属性,实现部件级精准感知,驱动机器人安全抓取与数字孪生高保真模拟。

触手怪
视触觉高分辨率传感器嵌入夹爪,模拟人手触压、滑移、软硬感知,实现斟茶、摘果、装配等精细操作。
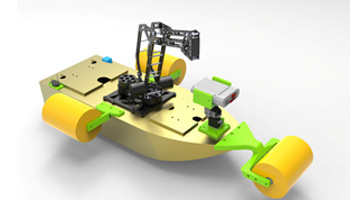
海洋智造队
水面自主机械臂把无人船与机械臂合一,感知-决策-执行闭环,高灵活多功能,助力海洋经济。

IDADM Lab
机器人视觉感知软件系统——“慧眼”以2D+3D融合算法零样本检测全类缺陷,即插即用赋能工业质检,降本增效,加速智能制造。
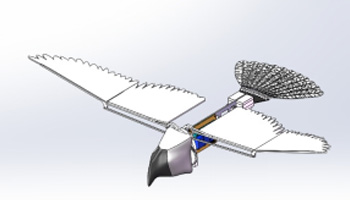
灵翼逐风队
SMA双弹簧尾翼+单电机两端式扑翼,8g尾翼+100g整机,红外/无线双控,1Hz高频循环,续航与机动提升20%,极致轻量化仿生FWMAV。
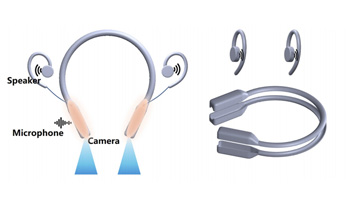
Watchman
全球首创项圈耳机式视障抓取助手,免手持集成摄像头+实时算法,与视障者共设计交互,轻便长戴,随时指引抓物。

触微科技
25×15×8mm微触觉传感器:热致变色石蜡-PDMS相变软吸附+Pt薄膜加热,5μm精度,0.08N力预测,可微柱装配,为微操作机器人领域提供了高效、精准的触觉感知解决方案。

曲探智手
仿生灵巧手+可弯曲柔性超声探头,自适应贴合3cm曲率曲面,六维力控与AI算法实现2mm缺陷精准自动探伤,实现高危环境自动化超声探伤。